Créer une alarme de mouvement
| Projet | Durée | Difficulté | Âge | Logiciel STeaMi testé |
|---|---|---|---|---|
| I-Novmicro #2 | 10 min | Débutant | 11-99 ans | 0.23.1 |
Matériel et Montage
- 1 carte STeaMi
- 1 câble USB de données (micro-USB pour la STeaMi V1, USB-C pour la STeaMi V2)
- 1 ordinateur sous Windows, macOS ou Linux
- Un IDE compatible MicroPython : Thonny (voir la fiche Thonny : Prise en main de MicroPython) ou tout autre éditeur compatible (Mu, VS Code, Vittascience,
mpremote...).

De quoi parle-t-on ?
Quand un magasin se fait cambrioler la nuit, quand une porte de garage s'ouvre toute seule à l'approche d'une voiture, quand le détecteur d'un escalier roulant le déclenche dès qu'on pose le pied dessus : à chaque fois, un capteur de mouvement a su voir « quelque chose bouge » et déclencher une réaction.
La STeaMi embarque deux capteurs qui permettent de détecter le mouvement de deux façons complémentaires :
- L'accéléromètre (ISM330DL) sent quand on bouge la carte elle-même : si quelqu'un la prend, la déplace, la secoue.
- Le capteur de distance à temps de vol (VL53L1X) sent quand quelque chose bouge devant elle : une main, un objet qui passe.
Dans cette activité, on combine les deux pour fabriquer une alarme à double protection : la STeaMi sonne soit si on la déplace, soit si une main s'approche d'elle. On utilise le bouton Menu pour armer ou désarmer l'alarme, comme une vraie alarme de maison.
L'accéléromètre et le capteur de distance sont déjà soudés à la STeaMi. On n'a rien à brancher : il suffit de les appeler depuis le code. Voir les fiches Fabriquer un thérémine (capteur de distance) et Mesurer l'inclinaison avec l'accéléromètre pour découvrir chaque capteur en détail.
Objectifs d'apprentissage
À la fin de cette activité, l'élève sera capable de :
- Expliquer comment fonctionne une alarme à détection de mouvement et citer des objets du quotidien qui en contiennent (alarme antivol, escalier roulant, ouverture automatique de porte, robot aspirateur...).
- Combiner deux capteurs complémentaires (accéléromètre + capteur de distance) pour détecter un mouvement de deux façons différentes.
- Détecter une variation d'une mesure plutôt qu'une valeur absolue : ce qui compte, ce n'est pas la position du capteur, mais le changement par rapport à l'instant précédent.
- Utiliser un bouton comme interrupteur logique (état actif/inactif) avec une variable booléenne
True/False. - Imaginer d'autres applications : alarme antivol pour sac, détecteur d'intrusion dans une chambre, jouet qui se réveille quand on approche...
Étape 1 : Construire
« Construire » se résume ici à localiser les deux capteurs : ils sont déjà soudés dans la carte, rien à câbler.
Repérer les deux capteurs sur la STeaMi
- L'accéléromètre est sur la face arrière de la carte (le côté opposé à l'écran). Il mesure les forces qui agissent sur la carte : gravité quand elle est immobile, secousses dès qu'on la bouge.
- Le capteur de distance est sur la face avant (le même côté que l'écran), à côté de l'écran OLED. Il envoie un faisceau laser invisible vers l'avant et mesure la distance à l'objet le plus proche.
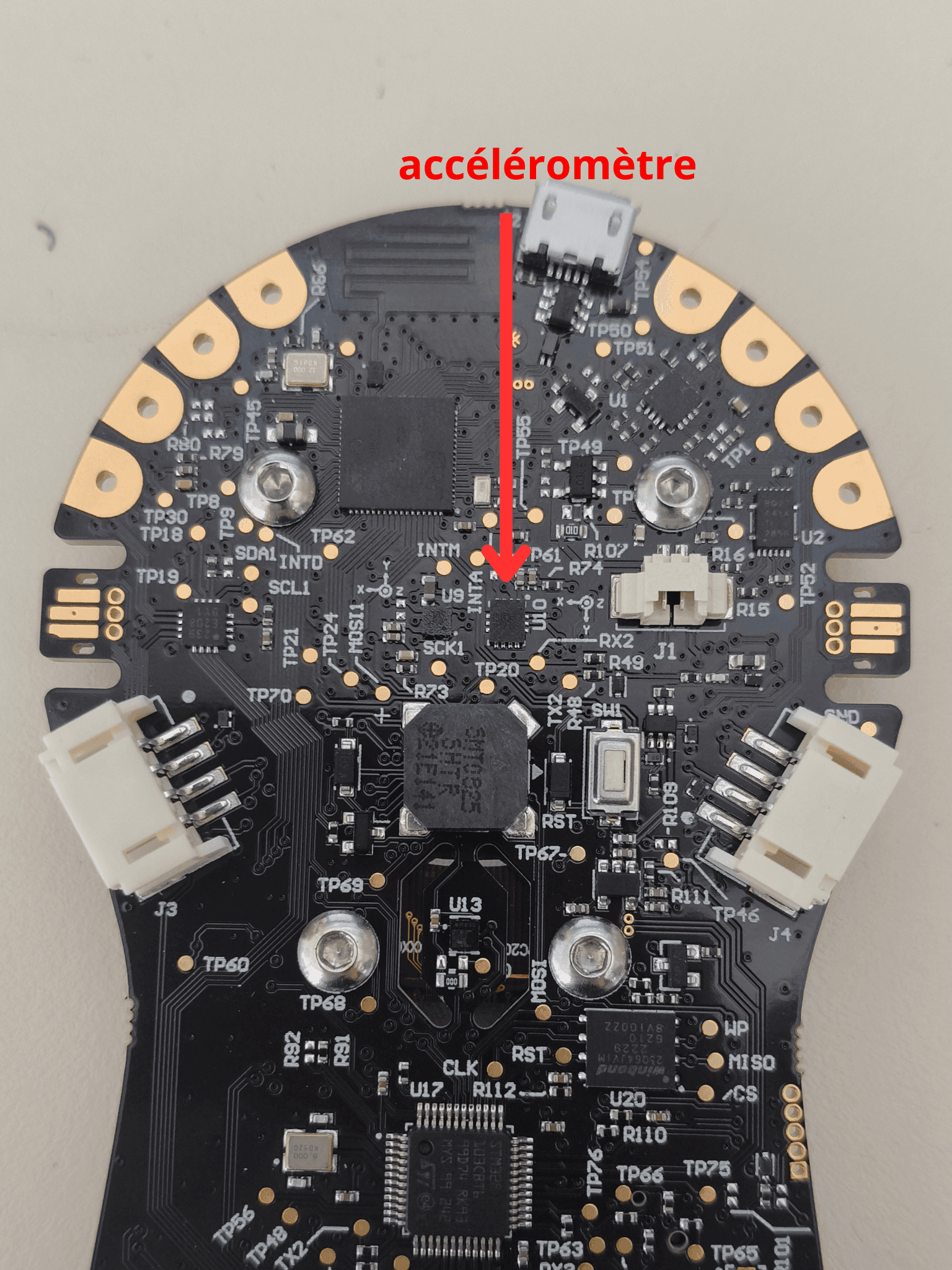
L'accéléromètre sur la face arrière de la STeaMi.
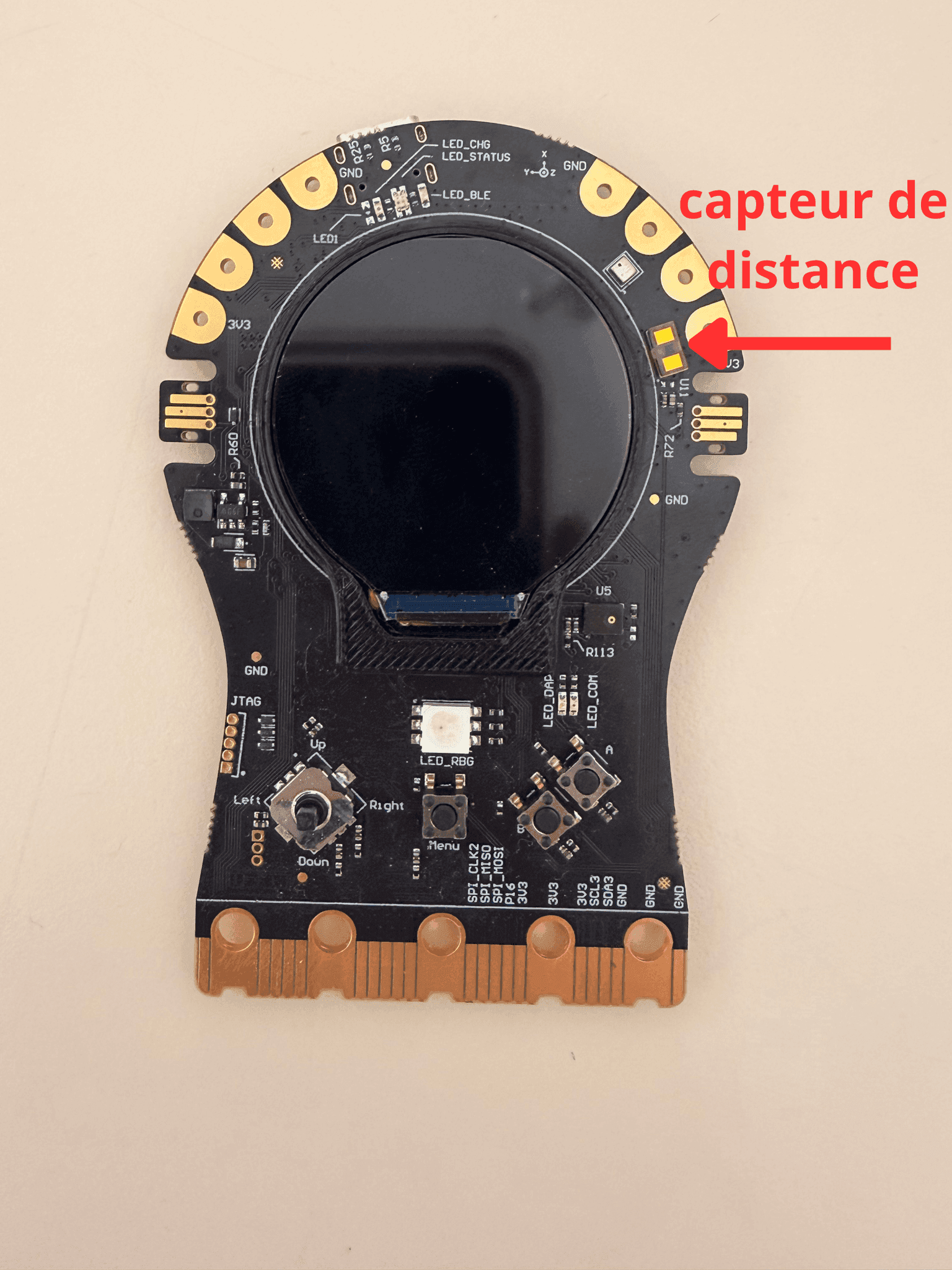
Le capteur de distance sur la face avant de la STeaMi.
Le bouton Menu
La STeaMi possède un bouton noté Menu en plus des boutons A et B. On va s'en servir comme interrupteur pour activer ou désactiver l'alarme : pression = on bascule entre les deux états (alarme armée / alarme désarmée), comme un vrai clavier d'alarme de maison.
Connecter la carte à l'ordinateur
Branchez la STeaMi à l'ordinateur via le câble USB. Si votre IDE MicroPython est déjà configuré (voir la fiche Thonny : Prise en main de MicroPython si vous démarrez), la console MicroPython doit afficher >>>. C'est l'invite (parfois appelée « prompt » en anglais) : un signe qui apparaît en début de ligne pour vous dire que la console est prête à recevoir une commande.
Étape 2 : Programmer
On va écrire un programme qui répète sans cesse la même boucle : lire les deux capteurs, comparer leurs mesures à la précédente pour détecter un changement, et sonner l'alarme si l'alarme est armée et qu'un seuil est dépassé. Le bouton Menu sert d'interrupteur pour armer ou désarmer.
Composants utilisés
| Composant | Nom dans le programme | Rôle |
|---|---|---|
| Accéléromètre | objet accelerometre | Détecte si la carte est déplacée ou secouée |
| Capteur de distance | objet capteur_distance | Détecte un objet qui s'approche de la face avant |
| Bouton Menu | objet bouton_menu | Arme ou désarme l'alarme (interrupteur) |
| Buzzer | objet buzzer | Émet le son d'alarme quand un mouvement est détecté |
Programme
# Testée avec firmware STeaMi 0.23.1
#
# Alarme de mouvement : sonne si on déplace la carte (accéléromètre)
# ou si un objet s'approche à moins de 20 cm (capteur de distance).
# Le bouton Menu arme et désarme l'alarme.
from machine import I2C, Pin
from vl53l1x import VL53L1X
from ism330dl import ISM330DL
import time
# --- Seuils de détection ---
DISTANCE_ALERTE = 200 # mm : alarme si un objet s'approche à moins de 20 cm
SEUIL_MOUVEMENT = 0.3 # G : alarme si l'accélération varie de plus de 0.3 G
# --- Capteurs ---
i2c = I2C(1)
capteur_distance = VL53L1X(i2c)
accelerometre = ISM330DL(i2c)
# Mémoire de la dernière accélération (pour détecter une variation)
acceleration_x_precedente, acceleration_y_precedente, acceleration_z_precedente = accelerometre.acceleration_g()
# --- Bouton Menu et état de l'alarme ---
bouton_menu = Pin("MENU_BUTTON", Pin.IN)
alarme_armee = False
# --- Buzzer ---
buzzer = Pin("SPEAKER", Pin.OUT_PP)
def sonner_alarme():
"""Fait sonner le buzzer à 2000 Hz pendant 500 ms."""
periode_us = int(1_000_000 / 2000)
demi_periode = periode_us // 2
fin = time.ticks_add(time.ticks_us(), 500 * 1000)
while time.ticks_diff(fin, time.ticks_us()) > 0:
buzzer.on()
time.sleep_us(demi_periode)
buzzer.off()
time.sleep_us(demi_periode)
while True:
# 1. Mesurer l'accélération et calculer la variation depuis le tour précédent
acceleration_x, acceleration_y, acceleration_z = accelerometre.acceleration_g()
variation = (
abs(acceleration_x - acceleration_x_precedente)
+ abs(acceleration_y - acceleration_y_precedente)
+ abs(acceleration_z - acceleration_z_precedente)
)
# 2. Mesurer la distance à l'objet le plus proche
distance = capteur_distance.read()
print("distance:", distance, "variation:", variation, "armee:", alarme_armee)
# 3. Bouton Menu : armer / désarmer l'alarme
if bouton_menu.value() == 0:
alarme_armee = not alarme_armee
print("Alarme armee :", alarme_armee)
time.sleep_ms(300) # anti-rebond : éviter de rebasculer trop vite
# 4. Si l'alarme est armée, vérifier les deux conditions de déclenchement
if alarme_armee and distance < DISTANCE_ALERTE:
print("Intrusion detectee a", distance, "mm")
sonner_alarme()
if alarme_armee and variation > SEUIL_MOUVEMENT:
print("Mouvement detecte : variation =", variation)
sonner_alarme()
# 5. Mémoriser l'accélération courante pour le prochain tour
acceleration_x_precedente, acceleration_y_precedente, acceleration_z_precedente = (
acceleration_x,
acceleration_y,
acceleration_z,
)
time.sleep_ms(200)
Comment cela fonctionne ?
Le programme se lit en trois temps :
- Préparation : on « réveille » les deux capteurs, on configure le bouton Menu et le buzzer, et on définit les seuils de détection. La variable
alarme_armee(un booléenTrue/False) mémorise si l'alarme est armée ou pas. - Fonction
sonner_alarme(): génère un son fort à 2000 Hz pendant 500 ms par bit-banging (voir la fiche Composer une mélodie pour le détail de cette technique). - Boucle principale : à chaque tour (environ 5 fois par seconde), on lit les deux capteurs, on vérifie si le bouton Menu a été pressé pour changer l'état d'alarme, puis on déclenche le buzzer si l'alarme est armée et qu'une des deux conditions est remplie.
Pour l'accéléromètre, on ne s'intéresse pas à l'accélération à un instant donné (la gravité tire toujours vers le bas, donc il y a toujours environ 1 G présent). On s'intéresse au changement par rapport à l'instant précédent : si la carte est immobile, l'accélération reste stable, la variation est proche de 0. Si on bouge la carte, les axes changent rapidement, la variation grimpe.
C'est le même principe qu'un sismographe : il ne mesure pas la position du sol, il mesure les mouvements du sol par rapport à un état de référence. On parle de détection de variation : c'est une technique fondamentale pour reconnaître un événement dans un flux de mesures continues.
Quand on appuie sur le bouton Menu, le contact électrique « rebondit » : pendant quelques millisecondes, le signal alterne plusieurs fois entre ouvert et fermé avant de se stabiliser. Sans précaution, notre programme verrait plusieurs pressions au lieu d'une seule, et l'alarme basculerait plusieurs fois.
Le time.sleep_ms(300) après chaque détection de pression est un anti-rebond logiciel : on ignore les changements pendant 300 ms, le temps que le contact se stabilise. Toutes les vraies alarmes (de maison, de voiture, d'ascenseur) intègrent ce genre de filtrage.
Exécution
- Test rapide : lancez le programme depuis votre IDE (typiquement bouton Run ▶ ou
F5). Les valeurs défilent dans la console MicroPython. Pressez Menu pour armer, puis bougez la carte ou approchez une main à moins de 20 cm. - Programme persistant : enregistrez le fichier sous le nom
main.pysur la carte. Il sera relancé à chaque démarrage : vous pouvez ranger la STeaMi sous votre lit comme une vraie alarme.
Étape 3 : Améliorer
Trois pistes pour aller plus loin.
1. Délai d'armement
Sur une vraie alarme, on a 30 secondes après avoir pressé « Armer » pour sortir de la pièce avant que l'alarme ne devienne réellement active. Ajouter un délai avec time.sleep() ou un compte à rebours affiché à l'écran avant que alarme_armee ne devienne vraiment True.
2. Alerte visuelle en plus du son
Faire clignoter la LED RGB intégrée à la STeaMi en rouge en plus du buzzer. C'est essentiel pour les personnes malentendantes. Voir la fiche Faire clignoter une LED pour piloter la LED.
3. Afficher l'état sur l'écran
Plutôt que la console, afficher en grand sur l'écran OLED « ARMEE » (en rouge) ou « DESARMEE » (en vert), avec la distance courante. Voir la fiche Afficher du texte sur l'écran OLED pour piloter l'écran.
Aller plus loin
Pour comprendre
- Détection de mouvement (Wikipédia) : les différentes technologies utilisées pour détecter un mouvement (infrarouge passif, micro-ondes, ultrasons, caméras intelligentes), et leurs forces et faiblesses respectives. Notre alarme combine deux principes très différents : accélération et temps de vol.
- Anti-rebond (Wikipédia) : pourquoi les boutons mécaniques nécessitent un filtrage, et comment les ingénieurs résolvent ce problème depuis les premiers ordinateurs jusqu'aux claviers d'aujourd'hui.
- Système d'alarme (Wikipédia) : architecture générale d'une alarme professionnelle (capteurs, centrale, sirène, transmission). Notre montage est un mini-équivalent embarqué sur une seule carte.
Pour s'inspirer
- Anti-vol DIY pour sac à dos (Instructables) : un projet « pour de vrai » qui prolonge la fiche. À glisser dans un sac, sonne dès qu'on le déplace.
- Open-source home security with Raspberry Pi : système d'alarme complet (avec notifications téléphone) bâti sur la même logique que notre fiche, mais avec un Raspberry Pi pour la connectivité.
- Détecteur de présence pour tiroir : alarme dédiée à un tiroir ou une boîte à secrets. Variation amusante du même principe : on cache la carte, elle sonne si quelqu'un fouille.
- Capteur de chute pour personne âgée : application sérieuse de la même technique de détection de variation accélérométrique : un objet porté qui détecte une chute brutale et appelle automatiquement les secours.
Cette fiche fait partie du projet I-Novmicro #2 : Action EXAO. Adaptée du projet Let's STEAM (fiche r1as12-detecteur-mouvement) sous licence CC BY-SA 4.0.